🔥🔥Get ready for the ultimate Physics battle 2026 !!! 🔥🔥

Professor Physics Research Hub
Dive into experiments, research, and discoveries shaping tomorrow
Research Insights
Latest physics research updates and breakthroughs.
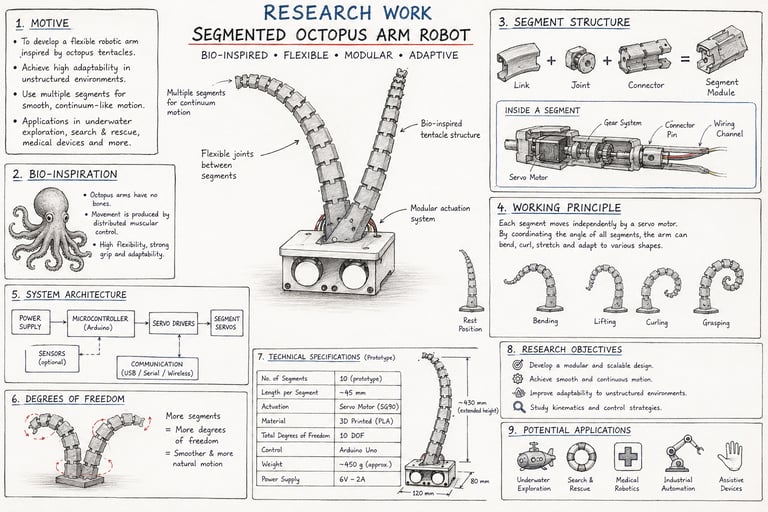
Bio-Inspired Segmented Octopus Arm Robot: Flexible Manipulation Through Modular Design
Description
This project explores the development of a robotic octopus arm inspired by the remarkable flexibility and adaptability of real octopus tentacles. Unlike conventional robotic arms that rely on a few rigid joints, this design consists of multiple interconnected segments that work together to create smooth, continuous motion. The segmented structure allows the arm to bend, curl, reach, and adapt to different environments while maintaining a lightweight and compact form.
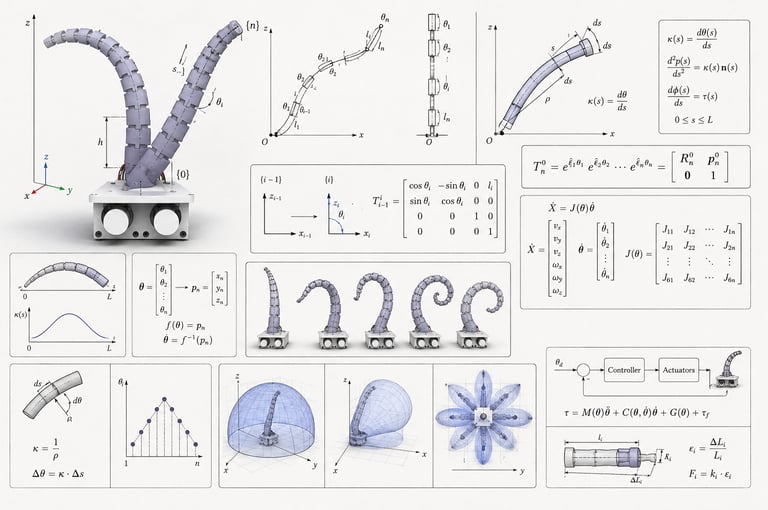
The prototype demonstrates how bio-inspired robotics can replicate natural movements using simple mechanical modules. By combining multiple segments, the arm achieves a high degree of freedom, enabling complex motions that are difficult to achieve with traditional robotic mechanisms. This approach has potential applications in soft robotics, exploration systems, assistive devices, and adaptive manipulators.
Why Use Segments?
The decision to use a segmented structure was driven by several engineering and biological advantages:
1. Increased Flexibility
Each segment contributes a small amount of movement, and together they create smooth, tentacle-like bending. This allows the arm to reach positions that rigid robotic arms cannot easily access.
2. Bio-Inspired Motion
Octopus arms do not have rigid bones. Instead, they achieve motion through distributed flexibility. Segmentation helps mimic this natural movement more effectively.
3. Higher Degrees of Freedom
A segmented design provides many independent points of motion,
enabling complex shapes, curves, and manipulation strategies.
4. Adaptability to Surroundings
The arm can navigate around obstacles and conform to irregular objects, making it suitable for unstructured environments.
5. Modular Development
Individual segments can be redesigned, replaced, or improved without rebuilding the entire robot, simplifying experimentation and future upgrades.
6. Improved Safety
Compared with rigid mechanisms, segmented arms distribute forces more evenly and can interact more safely with humans and delicate objects.
Project Motivation
The primary goal of this project was to investigate how nature-inspired engineering principles can be used to create robotic systems with enhanced flexibility and adaptability. By studying the octopus—a creature renowned for its dexterity and problem-solving abilities—I aimed to develop a robotic arm capable of producing smooth, organic motion using a modular segmented architecture.
This research contributes to the broader field of bio-inspired robotics, where engineers learn from natural systems to design more efficient, versatile, and intelligent machines for future applications in industry, healthcare, underwater exploration, and human-robot interaction.

Professor Physics
Explore the world of science together
Newsletter
© 2026. All rights reserved.